
Needle grippers for Polytec
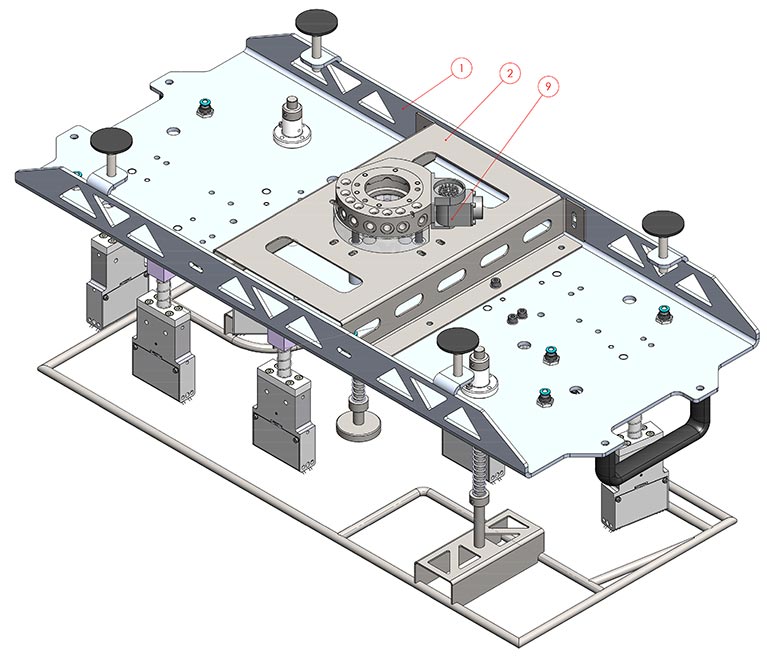
These needle grippers were designed so that a robot can grip and place custom-cut membrane and foam parts on a base material. The challenging aspect of this assignment was the fact that the products weigh next to nothing and that the robot moves quickly. This means that the products picked up and the base material run the risk of being misaligned as a result of air displacement. Our previous experience in developing similar grippers was very useful for this project.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}